

CAPSTONE DESIGN SHOWCASE 2022
-
DAYS
-
HOURS
-
MINUTES
-
SECONDS
COMING SOON


Team members
Pheh Jing Jie (ISTD), Anirudh Shrinivason (ISTD), Kanashima Hatsumi (ISTD), Tan Ze Xin Dylan (ISTD), Tan Kai Jie (EPD), Lim Hui Qing Kristabel (EPD), Wan Khay Weng Marcus (EPD)
Instructors:
Nagarajan Raghavan, Yeo Si Yong
Writing Instructors:
Teaching Assistant:
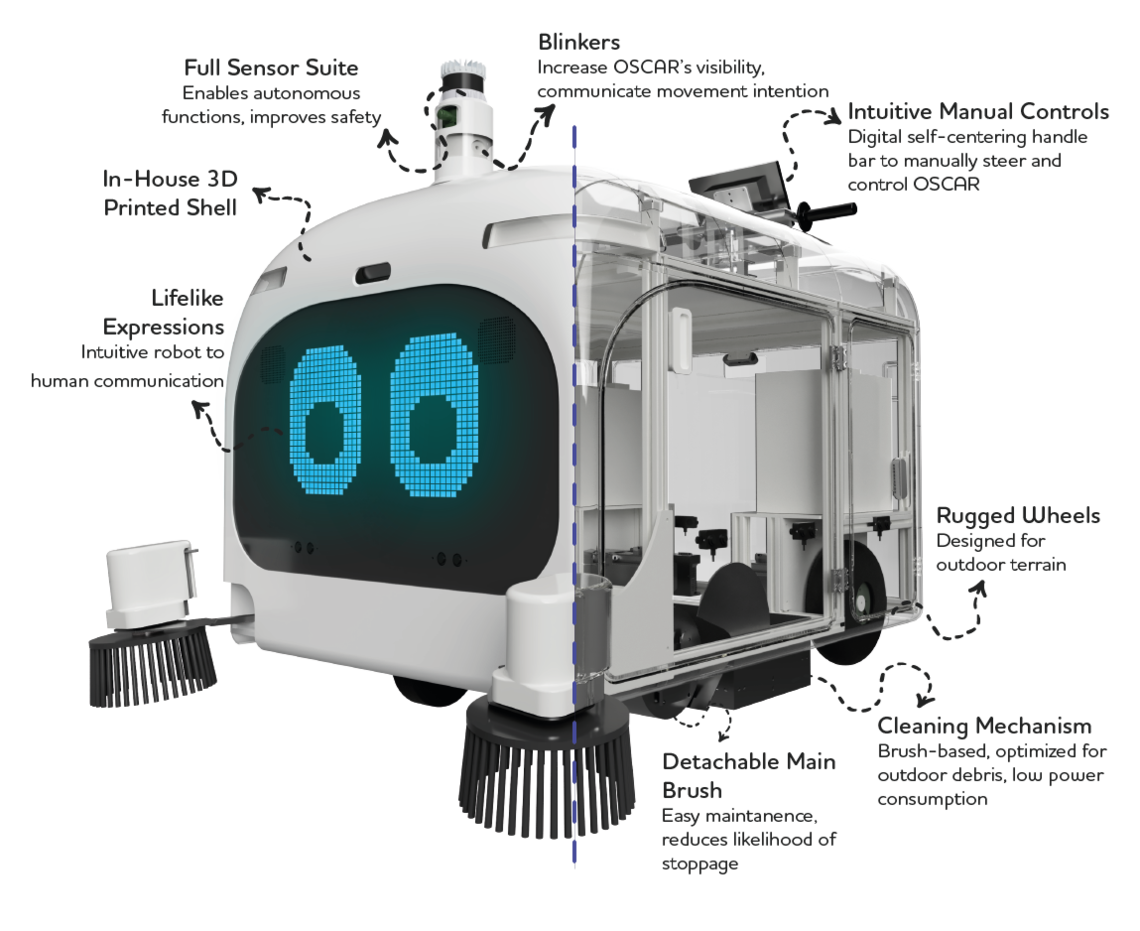

Easily removable brushes, and intuitive app interface for training and troubleshooting
3D Navigation Stack, Cleaning Mechanism, Rugged Wheels, and Weather Prediction

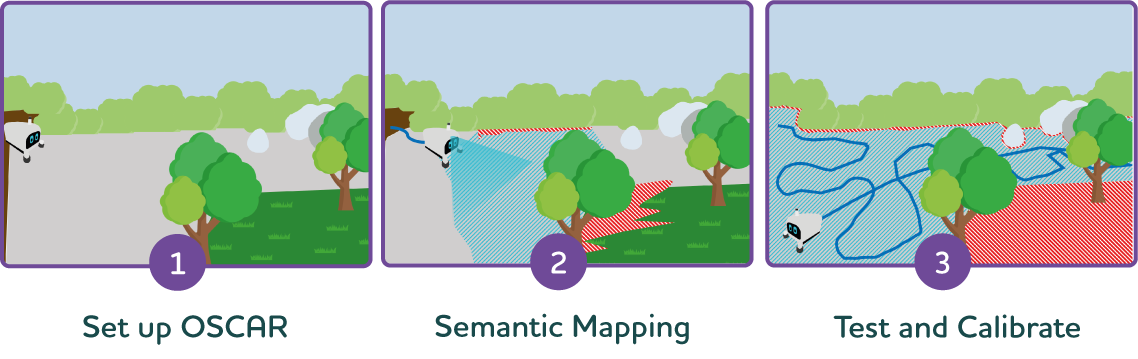
OSCAR comes with semantic mapping to automate deployment and app to accelerate operator training
Equipped with debris detection algorithm, and comes with 3 cleaning modes

Equipped with a diverse sensor suite, LED strips and robot expressions to indicate movement intention



 Pheh Jing Jie
Information Systems Technology and Design
Pheh Jing Jie
Information Systems Technology and Design
 Anirudh Shrinivason
Information Systems Technology and Design
Anirudh Shrinivason
Information Systems Technology and Design
 Kanashima Hatsumi
Information Systems Technology and Design
Kanashima Hatsumi
Information Systems Technology and Design
 Tan Ze Xin Dylan
Information Systems Technology and Design
Tan Ze Xin Dylan
Information Systems Technology and Design
 Tan Kai Jie
Engineering Product Development
Tan Kai Jie
Engineering Product Development
 Lim Hui Qing Kristabel
Engineering Product Development
Lim Hui Qing Kristabel
Engineering Product Development
 Wan Khay Weng Marcus
Engineering Product Development
Wan Khay Weng Marcus
Engineering Product Development
Pheh Jing Jie
Information Systems Technology and Design
Anirudh Shrinivason
Information Systems Technology and Design
Kanashima Hatsumi
Information Systems Technology and Design
Tan Ze Xin Dylan
Information Systems Technology and Design
Tan Kai Jie
Engineering Product Development
Lim Hui Qing Kristabel
Engineering Product Development
Wan Khay Weng Marcus
Engineering Product Development